


Описание
РобоКомпонент РКТ-М - адаптивный электромеханический захват для промышленных и коллаборативных роботов.
Захват имеет возможность настраивать положение смыкания, усилия и скорости.
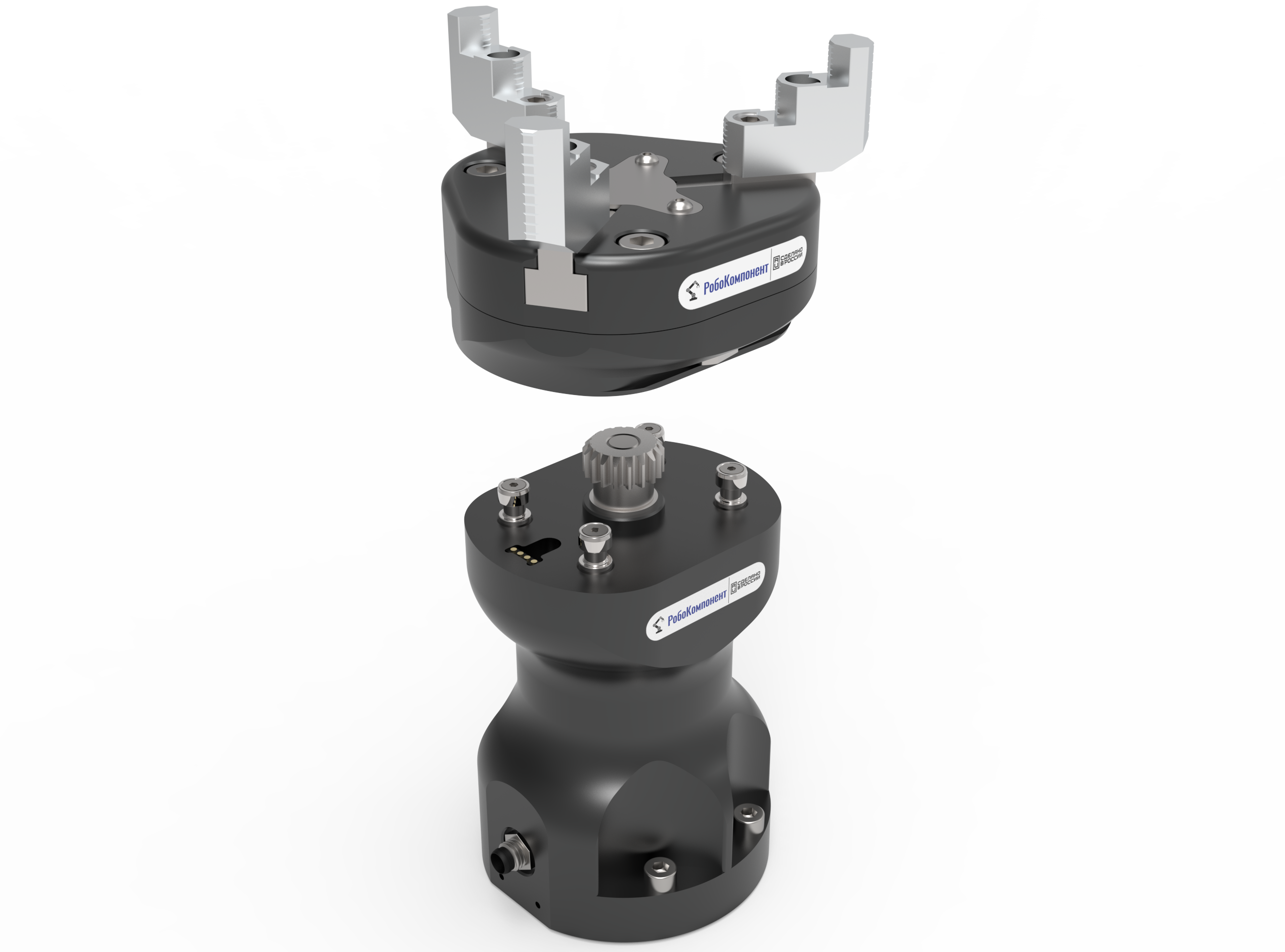
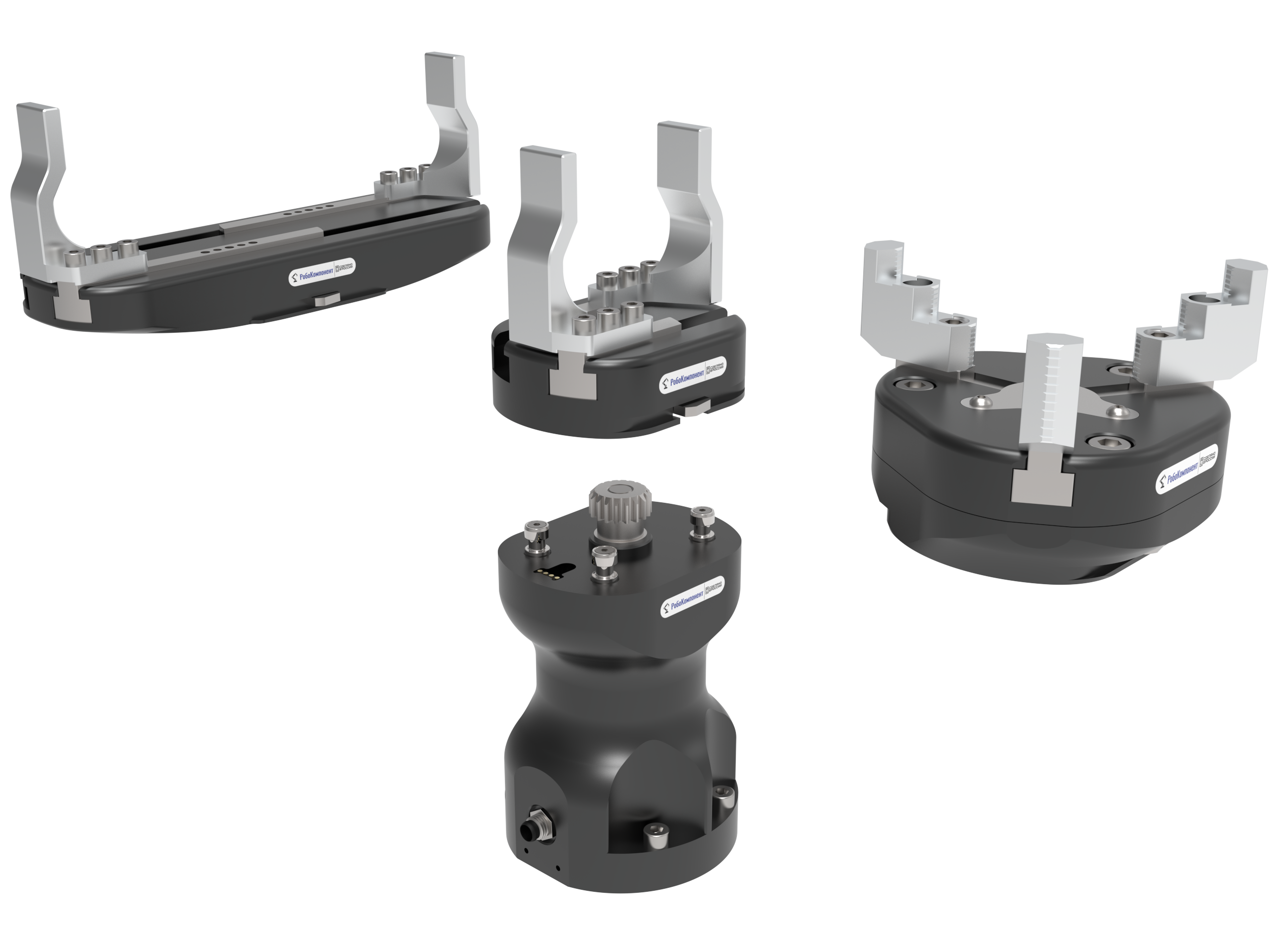
РКТ-М основан на модульном принципе и состоит из:
РКТ-М-БАЗА - основной модуль управления, на основе которого строится захватная система
РКТ-М-2-52 - двухпальцевый модуль с ходом 52 мм
РКТ-М-2-160 - длинноходный двухпальцевый модуль с ходом 160 мм
РКТ-М-3-24 - трехпальцевый модуль с ходом 24 мм
Интегрированная система смены модулей позволяет выполнять переналадку адаптивной захватной системы за считанные секунды.
Адаптивный захват РобоКомпонент РКТ-М подходит для использования с любыми промышленными и коллаборативными роботами, также возможно использование в составе систем промышленной автоматизации.
Захват имеет возможность настраивать положение смыкания, усилия и скорости.
РКТ-М основан на модульном принципе и состоит из:
РКТ-М-БАЗА - основной модуль управления, на основе которого строится захватная система
РКТ-М-2-52 - двухпальцевый модуль с ходом 52 мм
РКТ-М-2-160 - длинноходный двухпальцевый модуль с ходом 160 мм
РКТ-М-3-24 - трехпальцевый модуль с ходом 24 мм
Интегрированная система смены модулей позволяет выполнять переналадку адаптивной захватной системы за считанные секунды.
Адаптивный захват РобоКомпонент РКТ-М подходит для использования с любыми промышленными и коллаборативными роботами, также возможно использование в составе систем промышленной автоматизации.